Despription
Running is getting more and more popular, which can be observed by investigating the steadily rising numbers of people participating in organized running events. The most important tool when it comes to running is the pair of running shoes. The amount of different running shoes is huge, which leaves especially amateur runners with a hard decision what pair of shoes to get. Currently, there are two ways how to get running shoes recommended: an online survey or a personalized instore recommendation. However, both attempts have weaknesses. During an online survey, a lot of people don’t know answers to all the questions they are asked (e.g. about the type of pronation). The problem with the instore recommendation is, that it might be very subjective to the retailer. Besides, data acquired in a retail store on the treadmill might not be representative for outdoor runs. This shows, that there is a need for an objective, but still personalized running shoe recommendation. With the rise of wearables, data of different sources like inertial measurement units or GPS trackers is available, that can be used to extract features that describe a runner’s personal running style. Thus, the goal of this project is to extract these parameters and come up with an automated and objective, but still personalized running shoe recommendation.

Publications
| Zrenner, M., Küderle, A., Roth, N., Jensen, U., Dümler, B., & Eskofier, B. (2020). Does the Position of Foot-Mounted IMU Sensors Influence the Accuracy of Spatio-Temporal Parameters in Endurance Running? Sensors, 20(19), 5705. | |
| Abstract: Wearable sensor technology already has a great impact on the endurance running community. Smartwatches and heart rate monitors are heavily used to evaluate runners’ performance and monitor their training progress. Additionally, foot-mounted inertial measurement units (IMUs) have drawn the attention of sport scientists due to the possibility to monitor biomechanically relevant spatio-temporal parameters outside the lab in real-world environments. Researchers developed and investigated algorithms to extract various features using IMU data of different sensor positions on the foot. In this work, we evaluate whether the sensor position of IMUs mounted to running shoes has an impact on the accuracy of different spatio-temporal parameters. We compare both the raw data of the IMUs at different sensor positions as well as the accuracy of six endurance running-related parameters. We contribute a study with 29 subjects wearing running shoes equipped with four IMUs on both the left and the right shoes and a motion capture system as ground truth. The results show that the IMUs measure different raw data depending on their position on the foot and that the accuracy of the spatio-temporal parameters depends on the sensor position. We recommend to integrate IMU sensors in a cavity in the sole of a running shoe under the foot’s arch, because the raw data of this sensor position is best suitable for the reconstruction of the foot trajectory during a stride. | 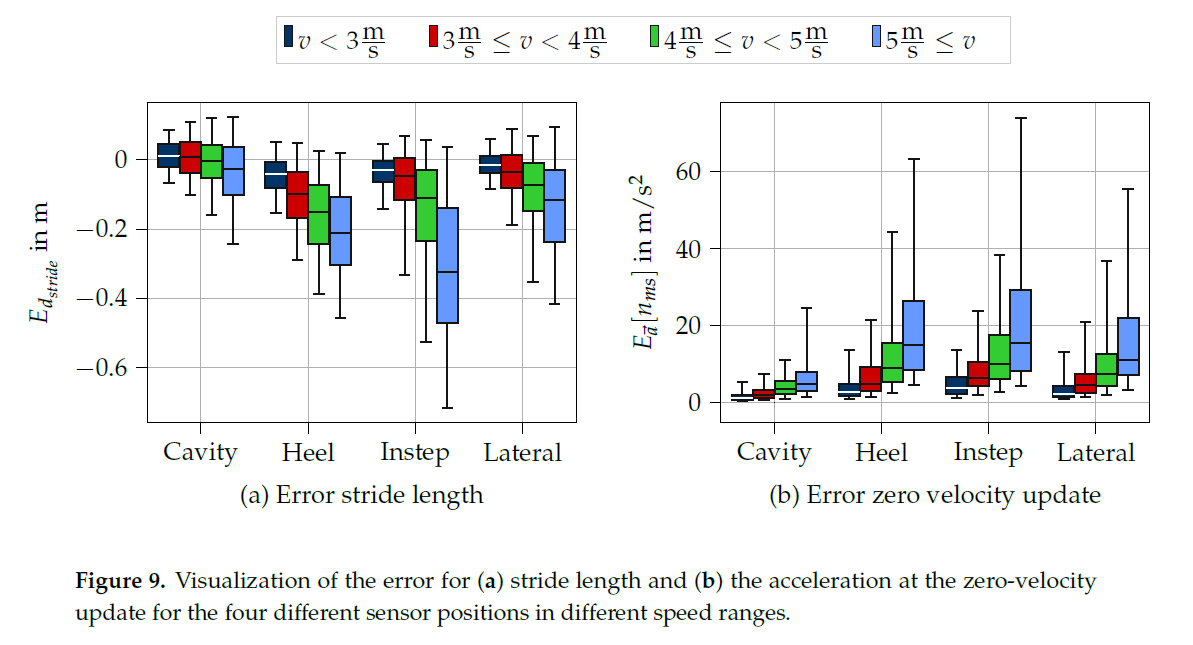 |
| Zrenner, M., Ullrich, M., Zobel, P., Jensen, U., Laser, F., Groh, B. H., Duemler, B. Eskofier, B. M. (2019). Evaluation of foot kinematics during distance running on different surfaces in real world environments. Paper presented at 12th International Symposium on Computer Science in Sports, Moscow, Russia | |
| Abstract: Despite the fact, that distance running is an outdoor sport most studies regarding foot kinematics have been conducted indoors in laboratories due to the stationary measurement equipment. Small and low-cost inertial measurement units (IMU) have proven to be accurate measurement tools for foot kinematics. In this study, we used such IMUs to evaluate the effect of different running terrains on foot kinematics in a real world scenario. For data collection twenty amateur runners ran for at least one kilometer on six different surfaces, which were asphalt, tartan, gravel, bark mulch, grass and trail. From the acquired IMU data, we computed the sole angle, the maximum sole velocity, the range of motion in the frontal plane and the maximum pronation velocity for each stride. The results show that the maximum angular rates as well as the absolute rotations are higher for stiffer and more regular surfaces like tartan and asphalt. | 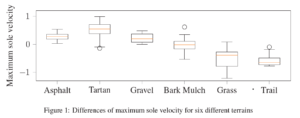 |
| Zrenner, M., Gradl, S., Jensen, U., Ullrich, M., & Eskofier, B. (2018). Comparison of Different Algorithms for Calculating Velocity and Stride Length in Running Using Inertial Measurement Units. Sensors, 18(12), 4194. | |
| Abstract: Running has a positive impact on human health and is an accessible sport for most people. There is high demand for tracking running performance and progress for amateurs and professionals alike. The parameters velocity and distance are thereby of main interest. In this work, we evaluate the accuracy of four algorithms, which calculate the stride velocity and stride length during running using data of an inertial measurement unit (IMU) placed in the midsole of a running shoe. The four algorithms are based on stride time, foot acceleration, foot trajectory estimation, and deep learning, respectively. They are compared using two studies: a laboratory-based study comprising 2377 strides from 27 subjects with 3D motion tracking as a reference and a field study comprising 12 subjects performing a 3.2-km run in a real-world setup. The results show that the foot trajectory estimation algorithm performs best, achieving a mean error of 0.032 plus/minus 0.274 m/s for the velocity estimation and 0.022 plus/minus 0.157m for the stride length. An interesting alternative for systems with a low energy budget is the acceleration-based approach. Our results support the implementation decision for running velocity and distance tracking using IMUs embedded in the sole of a running shoe. | 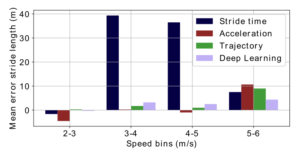 |
| Zrenner, M., Ullrich, M., Zobel, P., Jensen, U., Laser, F., Groh, B. H., Duemler, B. Eskofier, B. M. (2018). Kinematic parameter evaluation for the purpose of a wearable running shoe recommendation. Paper presented at the 15th IEEE International Conference on Wearable and Implantable Body Sensor Networks, Las Vegas, NV, USA. | |
| Abstract: We present a system capable of computing two major kinematic parameters that are necessary for a running shoe recommendation. The system consists of one inertial measurement unit located in each sole of a pair of running shoes. This unobtrusive integration allows for a long-term and objective assessment of the strike type and the pronation of the foot, which can be characterized by the sole angle and the range of motion respectively. An algorithm for computing these parameters is presented, which includes a sensor to shoe alignment, a step segmentation and a quaternion based angle calculation. A study including 5112 ground contacts from 27 subjects was conducted to evaluate the accuracy of the presented algorithm. The best results compared to a motion capture system can be achieved with a subject dependent sensor to shoe alignment with a mean absolute error of 2.8° plus/minus 2.5° for the sole angle and 2.0° plus/minus 1.9° for the range of motion. |  |
Partners
![]()