
ID 2340: Approximate Inverse Optimal Control via Annealing and Warmstarts
Research Internship / Project
The reverse engineering of human movements. Inverse Optimal Control, also called Inverse Reinforcement Learning, is used to find a cost function that is related to a certain movement. For human movement, the exact cost function is unknown. Current Inverse Optimal Control methods are either slow [1] or untested on real-world data [2]. On top of that, local minima in the are a problem often faced within simulations of human movements. The project idea is to exploit the local minimum obtained through tracking the movement, which enables the use of warmstarts to significantly speed up computation time.
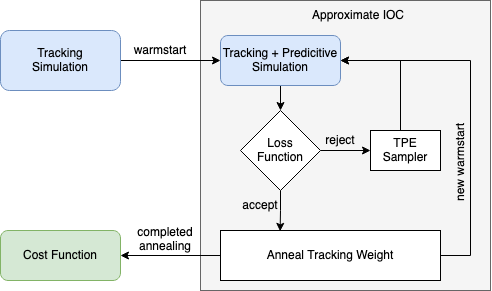
In this project, you will implement the annealing algorithm (see featured image) and compare it against an already implemented bi-level optimization algorithm [1].
Requirements:
- Basic knowledge in python/MatLab
- (optional) Interest in control theory, git knowledge

If you are interested in working with us, please use the application form to apply and tell us which topics you would be most interested in. We will then get in contact with you and together, we can identify a suitable topic for you.
[1] V. Q. Nguyen, R. T. Johnson, F. C. Sup, and B. R. Umberger, “Bilevel Optimization for Cost Function Determination in Dynamic Simulation of Human Gait,” IEEE Trans. Neural Syst. Rehabil. Eng., vol. 27, no. 7, pp. 1426–1435, Jul. 2019.
[2] J. R. Rebula, S. Schaal, J. Finley, and L. Righetti, “A Robustness Analysis of Inverse Optimal Control of Bipedal Walking,” Apr. 2021, arXiv:2104.12042 [cs].