Project leader:
Project members: , ,
Start date: 1. October 2015
End date: 31. December 2016
Funding source: Bayerisches Staatsministerium für Bildung und Kultus, Wissenschaft und Kunst (ab 10/2013) / Forschungsverbund
Abstract
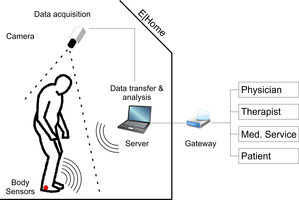
A current challenge is the transfer of mobile sensor-based gait analysis systems from clinical settings to the home environment to capture movement parameters and their changes (for example due to medication) in everyday life. The goal of this project is to build a complementary, video and sensor based system which can be used to evaluate long-term monitoring of interventions in Parkinson's Disease in the home-environment. Ethical aspects of home-monitoring are especially taken into consideration in the development phase. The sensor system will be based on the eGaIT system ("embedded Gait analysis using Intelligent Technology) and a markerless video-capturing system. Ethical research is performed to consider potential issues within this scope.
Publications
- , , , , :
MotionLab@Home: Complementary Measurement of Gait Characteristics Using Wearable Technology and Markerless Video Tracking - A Study Protocol
In: Advanced Engineering Forum 19 (2016), p. 149-155
ISSN: 2234-9898
DOI: 10.4028/www.scientific.net/AEF.19.149
BibTeX: Download - , , , , , :
Towards Mobile Gait Analysis: Concurrent Validity and Test-Retest Reliability of an Inertial Measurement System for the Assessment of Spatio-Temporal Gait Parameters
In: Sensors 17 (2017), p. 1522
ISSN: 1424-8220
DOI: 10.3390/s17071522
BibTeX: Download